






《控制工程基础》课程教学大纲
《控制工程基础》课程教学大纲
课程名称:控制工程基础
英文名称:Control Engineering Foundation
课程类型:专业平台课
总学时及学分:32学时,2学分
适应对象:车辆工程
主要先修课程:高等数学、工程数学,大学物理、电路分析
执行日期:2017年9月
一、课程的性质与任务
性质:本课程是车辆工程类专业的一门专业必修课。本课程共32学时,考试课。
任务:使学生掌握负反馈控制原理、控系统数学模型的建立和系统性能分析、设计的基本方法,培养学生分析和设计自动控制系统性能的基本力并能满足其它后续专业课程对自动控制理论知识的需要。
二、课程的教学目标
知识的掌握:本课程使学生掌握负反馈控制原理、控系统数学模型的建立和系统性能分析、设计的基本方法。
能力的培养:培养学生分析和设计自动控制系统性能的基本力并能满足其它后续专业课程对自动控制理论知识的需要。
素质的培养:培养学生分析和设计自动控制系统性能的基本力并能满足其它后续专业课程对自动控制理论知识的需要。
三、教学内容及其基本要求
第一部分 (模块一)控制系统导论
目的要求
1、了解自动控制系统的基本职能元件、基本术语及方框图。
2、了解自动控制定义。
3、了解开环、闭环控制的定义、基本框图。
教学内容
1、自动控制在各领域的应用。
2、自动控制的作用。
3、自动控制定义:自动控制就是在没有人直接参与的情况下,利用控制器使被控对象(或过程)的某些物理量自动地按预先给定的规律去运行。
4、自动控制系统的基本职能元件及基本框图等。
5、开环控制与闭环控制。
教学基本要求:使学生了解开环、闭环控制的定义、基本框图
教学重点:自动控制系统的基本职能元件及基本框图等。
教学难点:开环控制与闭环控制
第二部分 (模块二)控制系统的数学模型
目的要求
1、了解建立数学模型的意义和数学模型的特点、类型。
2、了解建立微分方程数学模型的方法和步骤。
3、了解机械平移、旋转系统、电学系统和复杂系统微分方程的建立。
4、了解非线性模型的线性化的方法、条件和步骤。
5、了解线性常系数微分方程的拉氏变换法求解。
6、了解线性定常系统传递函数的定义、实际意义、性质及微观结构。
7、了解零极点分布与系统响应的关系。
8、了解各典型环节的传递函数、运动方程、阶跃响应及特点。
9、了解控制系统的动态结构图。
教学内容
数学模型的基本概念、特点、类型,系统微分方程的建立,非线性模型的线性化 ,线性常系数微分方程的求解 ,传递函数的定义、实际意义、性质及微观结构,零极点分布与系统响应的关系,典型环节及传递函数,控制系统的动态结构图。
教学基本要求:使学生了解线性定常系统传递函数的定义、实际意义、性质及微观结构。
教学重点:典型环节及传递函数,控制系统的动态结构图。
教学难点:零极点分布与系统响应的关系
第三部分 (模块三)线性系统的时域分析法
目的要求
1、了解一阶系统的脉冲响应和斜坡响应。
2、了解自动控制系统的典型输入信号,掌握控制系统的动态性能指标和稳态性能指标。
3、了解一阶系统的数学模型、阶跃响应及其性能指标
4、了解二阶系统闭环极点的分布和参数的关系。
5、了解二阶系统的不同阻尼比下的单位阶跃。
6、了解欠阻尼二阶系统动态性能指标的计算和单位斜坡响应以及改善二阶系统性能的两种方法。
7、了解二阶系统的单位冲击响应。
8、了解常规控制在自动控制系统中的应用。
9、了解闭环主导极点的意义、定以及条件。
10、了解高阶系统的降阶。
11、了解误差的概念和定义、给定作用下稳态误差的计算及各种输入下误差系数的计算。
12、了解扰动作用下稳态误差的计算。
13、了解提高系统控制精度的措施。
教学内容
1、一阶系统的时域分析
2、二阶系统的时域分析
3、线性系统的稳定性分析
4、线性系统的稳态误差分析。
教学基本要求:使学生了解误差的概念和定义、给定作用下稳态误差的计算及各种输入下误差系数的计算
教学重点:一阶系统的时域分析
教学难点:二阶系统的时域分析
第四部分 (模块四)线性系统的频域分析法
目的要求
1、了解典型环节、开环系统和闭环系统的频率特性。
2、了解频率稳定判据。
3、了解频率稳定裕度。
教学内容
1、频率特性
2、典型环节、开环系统和闭环系统的频率特性
3、频率稳定判据
教学基本要求:使学生了解典型环节、开环系统和闭环系统的频率特性。
教学重点:典型环节、开环系统和闭环系统的频率特性
教学难点:频率稳定判据
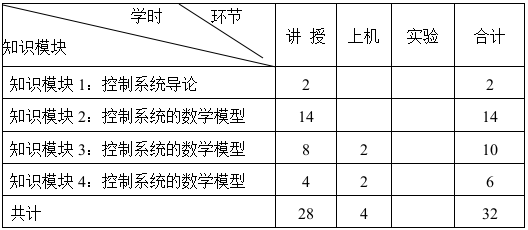
四、各教学环节学时分配
五、教学建议
根据学生的特点,注重结合实际问题讲解
六、考核评价方法及要求
考核方式:考试。
严格考核学生出勤情况,达到学籍管理规定的旷课量取消考查资格。综合成绩根据平时成绩和期末成绩评定,平时成绩占30%,期末成绩占70%。
总评成绩=平时成绩+期末考试成绩
七、教材与主要教学参考资源
教材
1、胡寿松:自动控制原理基础教程,科学出版社
参考书目
1、胡寿松:自动控制原理,科学出版社,2013
制定者:王密香、2017年8月
审核者:田建军、2017年8月
批准者:沈文涛、2017年8月

